需求分析
为解决基于特征值特征向量的柱面识别策略不鲁棒的问题,本文在上周工作的基础上提出了一种基于棱线配对的柱面识别策略。
输入输出
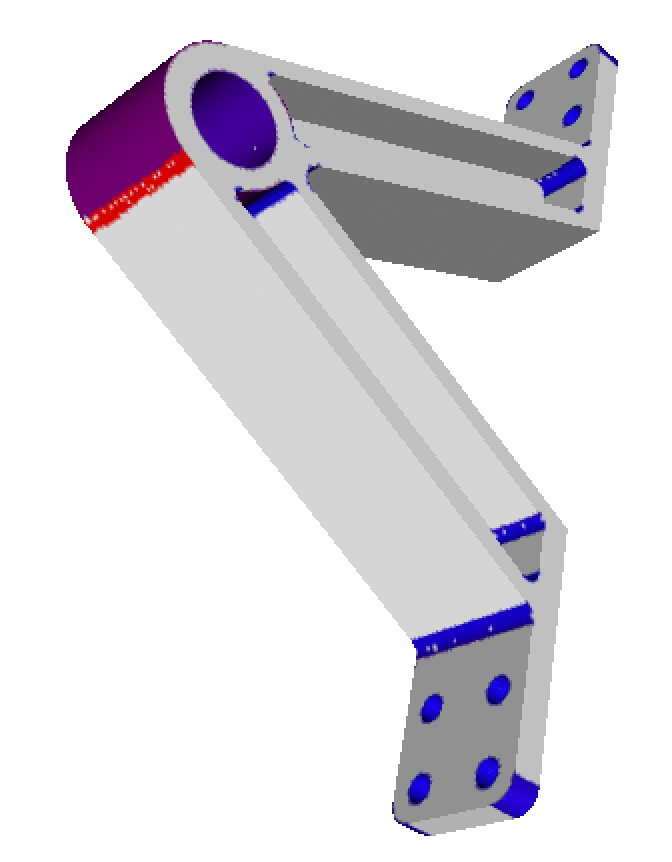
- 输入:局部可能包含柱面和椭球面的三维离散化网格
- 输出:柱面的参数
识别策略
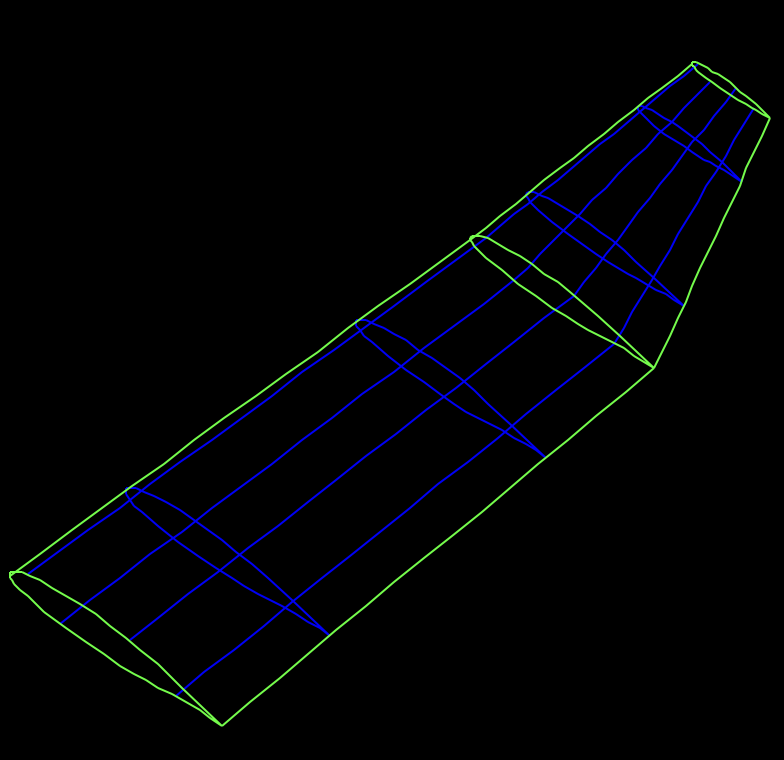
既然是基于棱线配对的柱面识别策略,那么首先我们需要获取棱线。在网格生成中,棱线是一个很重要的概念,它是由两个顶点组成的线段,而顶点是由三角形面共享的。因此,我们可以通过遍历所有的三角形面,获取所有的棱线。在此之后,需要对棱线进行几何意义上的分段与拟合,获取棱线局部的曲率半径及曲率中心,选择出属于局部圆形的棱线。在此之后,需要对识别出的圆进行剪枝,这一步比较依赖于经验,因为不同模型数量级和大小不同,剪枝策略下对应的阈值参数也不同。最后需要对剪枝后的圆进行参数化,并将各个圆形两两配对,得到最终的柱面参数。
棱线获取
设置宏定义`EDGE_INDEX’,通过遍历所有的边,根据其相邻面片法向量的差是否大于’EDGE_INDEX’来判断是否为棱线。
以下是一个代码示例,并非基于MeshLib的实现,仅供参考。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| #define EDGE_INDEX 0.8
for (int i = 0; i < mesh->numEdges(); i++) {
Edge *edge = mesh->edge(i);
if (edge->isBoundary()) continue;
Face *face1 = edge->halfedge(0)->face();
Face *face2 = edge->halfedge(1)->face();
if (face1 == NULL || face2 == NULL) continue;
Vector3d normal1 = face1->normal();
Vector3d normal2 = face2->normal();
if (normal1.dot(normal2) < EDGE_INDEX) {
edge->isEdgeLine = true;
}
}
|
棱线拟合
对于识别出的棱线,我们需要对其进行拟合,获取其曲率半径及曲率中心,由于三点定圆,所以选择棱线上相互连续的三个点进行拟合,比较建议的选点策略是深度优先选择,可以尽可能的减少三点不共面的情况,三点不共面的情况会有但是实际上几乎不会影响到结果,毕竟很难找到对应的圆来与之配对。
以下是一个代码示例,并非基于MeshLib的实现,仅供参考。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| for (int i = 0; i < mesh->numEdges(); i++) {
Edge *edge = mesh->edge(i);
if (!edge->isEdgeLine) continue;
Vertex *v1 = edge->halfedge(0)->vertex();
Vertex *v2 = edge->halfedge(1)->vertex();
Vertex *v3 = edge->halfedge(0)->next()->vertex();
Vector3d p1 = v1->position();
Vector3d p2 = v2->position();
Vector3d p3 = v3->position();
Vector3d n1 = v1->normal();
Vector3d n2 = v2->normal();
Vector3d n3 = v3->normal();
Vector3d center = getCircleCenter(p1, p2, p3);
double radius = (p1 - center).norm();
edge->circleCenter = center;
edge->circleRadius = radius;
}
|
棱线剪枝
异常圆的剔除
剪枝主要去除的是棱线度不为2的点和半径过大的点,应该很好操作,这里不再赘述。
相近圆的合并
对于相近的圆,我们需要将其合并,这里的相近是指圆心距离小于一定阈值的圆,这个阈值是需要根据实际情况调整的,可以重载operator==来实现。
1
2
3
4
5
6
7
8
9
10
11
12
| struct circle
{
double radius;
CPoint center;
CPoint normal;
bool operator== (const circle& c) {
return abs(radius - c.radius) < ZERO && ((center - c.center).norm() < ZERO) && ((normal - c.normal).norm() < ZERO);
}
circle(double r,CPoint c,CPoint n):radius(r),center(c),normal(n){}
};
|
棱线配对
对于剪枝后的圆,我们需要将其两两配对,得到最终的柱面参数。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
void CirclePairRe<M>::getCirclePair()
{
for(int i = 0 ; i < circlelist.size() ; i++)
{
for(int j = i ; j < circlelist.size() ; j++)
{
if(abs(circlelist[i].radius - circlelist[j].radius) <ZERO && (circlelist[i].normal ^ circlelist[j].normal).norm() < ZERO && ((circlelist[i].center - circlelist[j].center)^circlelist[i].normal).norm() < ZERO )
{
auto cylinderCenter = (circlelist[i].center + circlelist[j].center) / 2;
auto cylinderHeight = (circlelist[i].center - circlelist[j].center).norm();
if(cylinderHeight < ZERO) continue;
auto cylinderRadius = circlelist[i].radius;
auto centerline = (circlelist[i].center - circlelist[j].center);
centerline /= centerline.norm();
auto rotate = new Eigen::Matrix3d();
CPoint x(-centerline[1], centerline[0], 0);
x /= x.norm();
CPoint y = centerline ^ x;
*rotate << x[0], x[1], x[2],
y[0], y[1], y[2],
centerline[0], centerline[1], centerline[2];
cylinder *cc = new cylinder(cylinderRadius,cylinderHeight,cylinderCenter,rotate);
cylinderlist.push_back(*cc);
}
}
}
}
|
总结
棱线配对可以避免线性相关的问题,提高了柱面识别的鲁棒性,但是在实际应用中,这样的方法大幅依赖棱线,但工业上很多倒角都是光滑先借的,应用场景有限,但是对于一些特殊的模型,这样的方法还是很有意义的。